Updates: V4
-Sep 2022, reinforced the outer shell
-Oct 2022, reinforced the wheels, moved the battery.
-Nov 2022, components added ( 1x IR distance sensor) , (removing Ultra-sonic sensor) -no need for ultra-sonic sensor IR sensor is enough.
-Dec 2022, code improvements and components added (Bluetooth module, 2x L293D micro-chips)
–Dec-Jan 2022-2023, complete redesign of wiring and connections. (improved power usage, speed and functionality, sensors and micro-chips added)
-Jan-Feb 2023, Increasing power capacity from 5500 mAh to 11,100 mAh. (adding a solar panel and 5600 mAh battery to an existing 5500 mAh battery) -Increasing speed and torque. The overall speed and torque will be increased by at least 3 times. Because the second battery is going to be used for drive motors only and the 5500 mAh will be used for sensors, processors, transmitters and servos.
————————–V4 ends here——————————————————————————-
V6
First Check in <- look below for progress
–Mar. 20 2023, Designing V6Robot: redesign of the outer shell and replacing all components: wheels, main motors, wires and more. The reason for this is that the main goal for this project is to turn in it into a product people can buy. The current wheels and motors are to expensive making the robot less affordable. There are better options that reduce the overall price to make it. This will probably also make the robot faster, because the motors I am currently using are less efficient both in price and performance. The current price to make the v4 robot is $250.29, for V6 I brought the price down to $95.60, and I already have the price for V7 it’s $73.05. Here is a look into the pricing of what it takes to make versions 4, 6, 7. Document bellow >
 Loading...
Loading...
Progress since Check in #1 <-look below for progress
-Apr. 1 2023 Once I finished the design I got to work on making the robot seven days later i finished the robot, I completely 3D printed and assembled the robot. It’s ready for testing and code improvements. This is a big achievement since I have managed to make a robot in seven days. This means I can make up to 35 robots a year. This was previously impossible since version 4 robot was very hard and expensive to make. Version 6 is more than x2.5 times cheaper to make and only takes 10 days to make, compared to 300+ days for version 4.
-Apr. 10 2023 I decided to make a mini version of the version 6 robot. My plan is to make the robots work together for the STEAM fair. The mini version isn’t really that small since it has almost the same volume as the v6, It’s just way cheaper to make and also takes half as much time. It takes about 4-5 days to make and the approximate cost is $45. It doesn’t have the arm and so far has limited functionality, but I expect to make some progress in that area and find a use for the robot.
-Apr. 15 2023 During testing of V6 I encountered a problem, I reached the limits of the Arduino. I burned two Arduinos trying to go around the problem. Basically what was happening is the Arduino could not handle the voltage and amp age provided by the battery, so i went around the problem by using an external logic processor which according to the information in the data sheet was supposed to handle this voltage and amp age, but heat it up to about 240C and exploded, that happened twice since I decided to tested it twice thinking it was just a faulty logic processor. Losses: 2 Arduinos, 2 Logic processors.
-Apr. 16-17 2023 Working on fixing the problem. Made some progress, got the motors to work. Arduino is directing the motors but the left motor is draining the power from the right motor causing it to stop randomly. Logic processor is still heating up although at lower temperatures than before.
-Apr. 17 – 25 2023. Still working on issues with the robot. Completely redesigning the first stage of the robot. Because the motors could not handle the weight of the robot. Added two gearboxes to increase overall power of the motors, now lower speed of the motors from 22,000 RPM to 5,500 RPM. This should not effect the speed of the robot. View image “V6” for an image of the new first stage. Images are at the bottom of the page.
Progress since Check in #2 <-look below for progress
-Apr. 25 May 1 2023. No issues so far, finishing up integration of the new first stage. Important to mention that the new first stage has fixed all of the issues and improved the centre of mass in the robot, this allows the robot to lift more weight without tipping over. New first stage is easier and faster to assemble. The robot can be taken apart into stages in less than five minutes, this makes it very easy to fix issues add upgrades and upload new software. Last motor has arrived this means I can work on finishing up the arm. Code is ready, arm is printed and assembled last thing left to do is to connect it to the robot. And the robot is now able to charge from a regular wall outlet. Special circuit converts 120v into usable 5v for charging. This circuit did not ended up working. New one was build later.
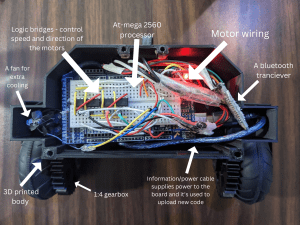
-May 2 – 15 2023. Made the charger. The charger is connected to a special port at the back of the robot. The charging of the high power motor battery only takes about 10 minutes and it can work for 3-4 hours without charging. The main battery can work for 20 hours without charging. Unfortunately I can’t use the charger I made for the motor battery because this charger can only charge Lithium polymer batteries. The main battery is a Lithium-ion battery so a diffirent charger will be made for Lithium-ion battery. So far to charge the main battery I have to remove everything from the core of the robot to get to the battery. Also finishing up the code and reprinting some of the parts. Added a cooling unit for extra cooling. Scroll down for a detailed view of the internal systems of the robot. Image 4
–May 15 2023. Since I don’t have enough time left, I decided not to build the mini version of the robot at least not this year. I will instead focus on improving the current version 5.2.
–May 15-30 2023. Finished working on the key parts of the robot like: arm, charging, power button, mostly code and working on extra features and ease of use.
Task queue: (Will be added in the next versions, look for “V7 Robot”)
– Adding AI. (might not be ready for the steam fair)
– Adding a text-to-action feature. (programmed actions activated by key words, that robot scans for in the sentence)
V6 stats:
Power: ~9,000mAh, 20 volts 1.5 Amps.
Motors: ~5,500 rotations per minute each. Top speed ~6km/h.
Processor: At-mega 2560, Ellegoo prototyping board (cheaper more powerful board, an alternative to Arduino).
4 Servo motors: Arm lift capacity is ~180g.
Partly 3D printed design (frame and wheels).
Weight: ~1.1kg
Aluminum Silicon wiring: more compact and stronger wiring design. This wiring is required since running 1.5 Amps through a thin wire makes it very hot. Silicon coding makes the wires handle temperatures of up to 200 C.
Loading...
PRESS RELOAD IF IT DOESN’T WORK
Interesting things about V6
My plan is to 3D print as much of the robot as possible. I already have most of the robot fully 3D printed last things would be using TPU filament to print tires and change the design a little bit to eliminate the use of screws. After that I would only need to buy electrical parts. This reduces the price by ~$30.
V1

V2
V3

V4
V5 was not build


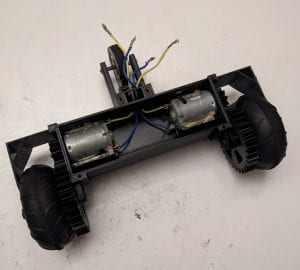





Image 4 (detailed view of internal systems) <- open image in new tab for better view (right click the image)
V6
version 6 <-click here
-3D version of the assembled version 5.2 robot (hover over “version 5.2” than click to download. Open the file in a 3D viewer).
Robot test video
I was testing the robot on low battery charge to see if the top speed is affected. So moments where you see the video cut out, the battery dies. This was at less than 1% battery charge, worked for 27 seconds. There was a minor reduction in speed, that I think I can improve. I can make the output from the motherboard to be higher voltage when the battery is low.
BACK TO HOMEPAGE <-click here